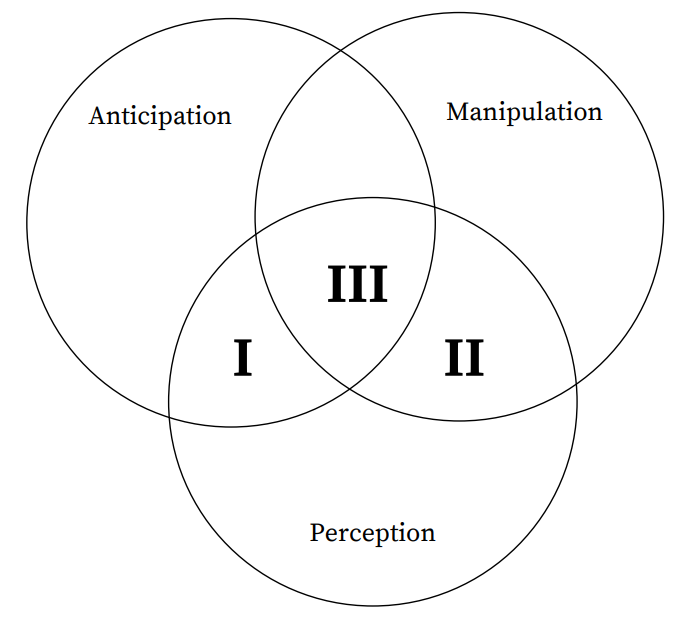
From Perception over Anticipation to Manipulation
[PhD Thesis] 2018
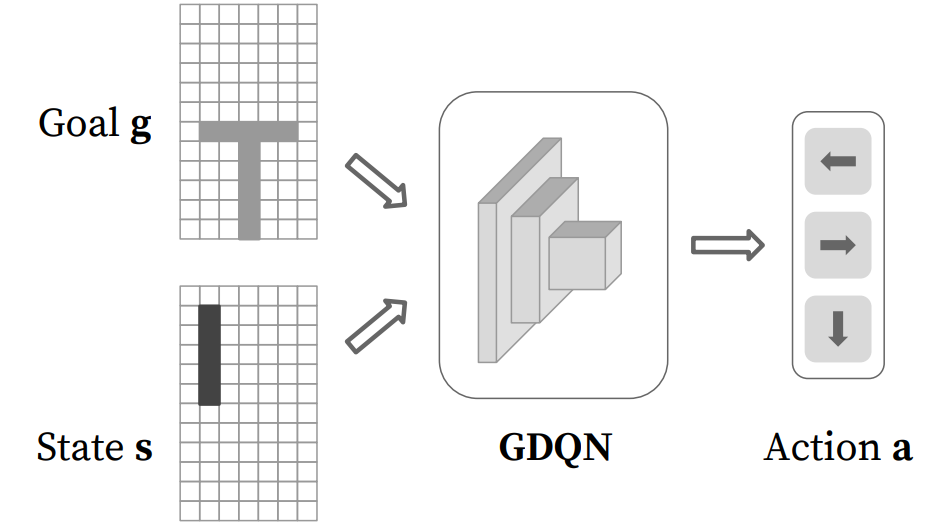
Acquiring Target Stacking Skills by Goal-Parameterized Deep Reinforcement Learning
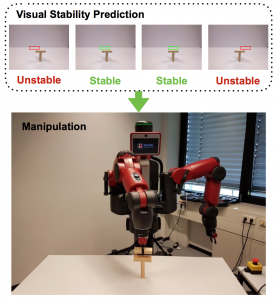
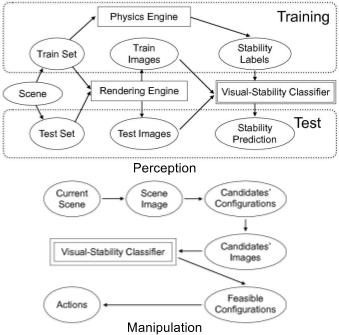
Visual Stability Prediction and Its Application to Manipulation
[arXiv 2016] [NIPS 2016 Intuitive Physics workshop] [Video]
[AAAI 2017 Symposium: Interactive Multi-Sensory Object Perception for Embodied Agents]
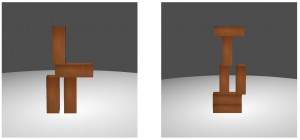
To Fall Or Not To Fall: A Visual Approach to Physical Stability Prediction
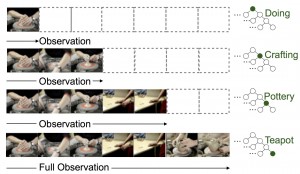
Recognition of Ongoing Complex Activities by Sequence Prediction over a Hierarchical Label Space
[WACV 2016] [project page] [Video]
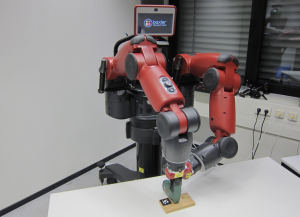
Teaching Robots the Use of Human Tools from Demonstration with Non-Dexterous End-Effectors
[Humanoids 2015] [Video]
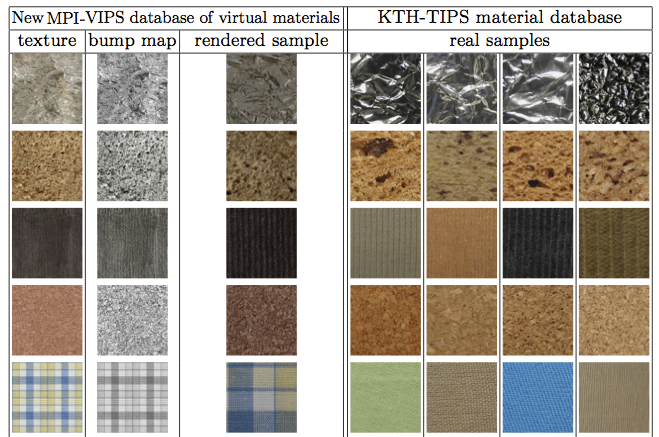
Learning Multi-scale Representations for Material Classification
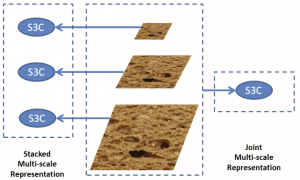
Multi-Scale Feature Learning for Material Recognition
[Master Thesis] 2013

Improving two-thumb text entry on touchscreen devices
[CHI 2013]